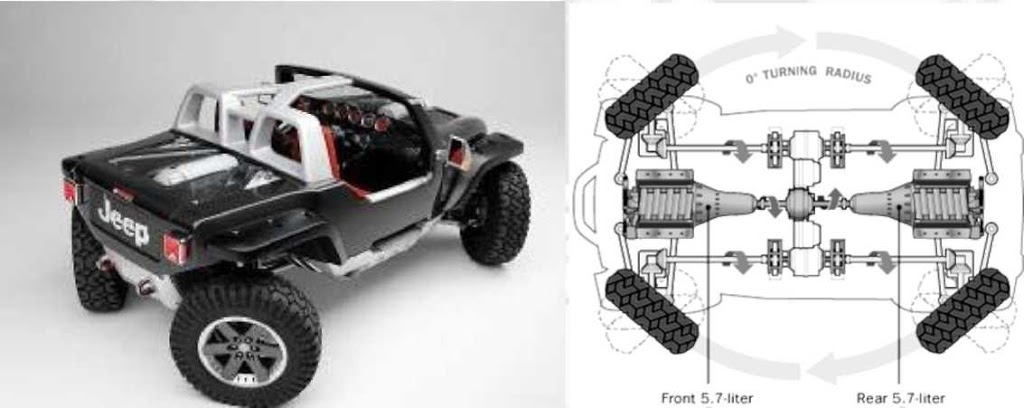
FIG 1.5 - The Jeep Hurricane concept with Zero Turning Circle Radius
ZERO TURN MECHANISM AKA ZERO RADIUS TURNING AKA 360 DEGREE TURNING VEHICLE PROJECT REPORT AND PPT | Get Mechanical engineering projects for study and research. we Mechanical farm, provide the widest list of mechanical engineering final year project to help students, researchers & engineers in their R&D. Also, we have a great variety of pre-made project kits using hydraulics, gears, energy generation systems for you to use in your projects.
Table of Contents
At slow speeds, the rear wheels turn in the direction opposite to the front wheels. This mode comes in particularly useful in case of pickup trucks and buses, more so when navigating hilly regions. It can reduce the turning circle radius by 25%, and can be equally effective in congested city conditions, where U-turns and tight streets are made easier to navigate. It is described as following in FIG 1.2.
In high speeds, turning the rear wheels through an angle opposite to front wheels might lead to vehicle instability and is thus unsuitable. Hence, at speeds above 80 kmph, the rear wheels are turned in the same direction of front wheels in four-wheel steering systems. This is shown in FIG 1.2
| FIG 1.3 – Crab Mode |
For a typical vehicle, the vehicle speed determining the change of phase has been found to be 80 km/hr. The steering ratio, however, can be changed depending on the effectiveness of the rear steering mechanism and can be as high as 1:1.
In addition to the afore mentioned steering types, a new type of four-wheel steering was introduced by the concept vehicle Jeep Hurricane, one that could significantly affect the way our vehicles are parked in the future. Its shown in the following FIG 1.3
This vehicle has all the three modes of steering described above, though it sports a truly complex drive-train and steering layout with two transfer cases to drive the left and right wheels separately. The four wheels have fully independent steering and need to turn in an unconventional direction to ensure that the vehicle turns around on its own axis.
Such a system requires precise calculation from a servo motor with real-time feedback to make certain that all three steering modes function perfectly. The concept didn’t make it to production, possibly due to the high costs involved in the power-train layout. But the idea presented by the concept continues to find importance. The only major problem posed by this layout is that conventional rack-and-pinion steering with pitman’s arms would not be suitable for this mode since the two front wheels are steered in opposite directions. Steer-by-wire systems would work fine, however, since independent control can be achieved.
When making a movement other than straight ahead driving. These forces compete with each other during steering maneuvers. With a front-steered vehicle, the rear end is always trying to catch up to the directional changes of the front wheels. This causes the vehicle to sway. When turning, the driver is putting into motion a complex series of forces. Each of these must be balanced against the others. The tires are subjected to road grip and slip angle. Grip holds the car’s wheels to he road, and momentum moves the car straight ahead. Steering input causes the front wheels to turn.
Source: Slideshare
Revolutionizing Manufacturing: The Synergy of IoT and CNC Technology The technological landscape has been profoundly transformed by the advent of…
2024 Best BE Mechanical Engineering Major Projects Ideas And Reports | A project is very important and best pieces of…
Introduction Hydroelectric power plants use the energy of falling or flowing water to generate electricity. They are one of the…
What is the Internet of Things? According to the "Introduction to IOT" by Bagha and Medissa, the Internet of Things,…
What is the OSI model? An OSI is the Open Systems Interconnection (OSI) model is the standard that covers all…
The most important and precious asset we have today is our Data, and protecting it should be our first task.…
This website uses cookies.
{kind=link}
{kind=link}
{kind=link}